Ottimizazione di Rendimentu Cù Mpu-6050: Configurazione, Calibrazione, è Applicazioni
2024-04-25
9262
Mpu-6050 Hè u primu cumpunente di u mondu integratu 6-Axis Motion di trasfurmazioni, chì integrapope 3-Axis gyoscopiu, 3-Axis accelerometru è un prucessu di mution digitali di u muvimentu digitali (DMP).U scopu di l'utilizà hè deve ottene l'angle di inclinazione di l'ughjettu (cum'è a carancatura, annantu à x, è u pavulu, u angulu pitch, intinua.Leghjemu e sei dati di u valore Mpu-6050 (trè Axis Accelerador Valore è trè Axis Angulare Velocity Velocity AD) à traversu l'interfaccia I2C.Dopu a furmazione di fusione in postura, u terrenu, rotulu, è l'anguli è sbuchjanu.Cum'è una riferenza direzzione per i valori di misura, a definizione di a cordinu di a so cordinata hè cume cum'è mostratu in a figura quì sottu, chì seguita u principiu di u ghjordinu a dirittazione di a direzzione pusitivu di u XXI POSSIDl'assi, l'indice indici à a direzzione pusitiva di a direzzione è l'assi è u dito mediu à a direzzione pusitiva di a direzzione Z-Axis.
Catalogu

Cù u so busu dedicatu iensoriu, u mpu-6050 hè capaci di riceve l'input direttamente da un paragunatore 3-AxisElimina u prublema discretante trà u timeline di Gyroscopiu è l'acceleratore cumminatu è reduce significativamente u spaziu di imballà in cumparatu cù soluzioni multi-cumpunenti.Quandu cunnessi à un magnetometru di trè axis, u mpu-60x0 hè capace di pressu l'output di furnisce à furnisce a so produzzione completa di furnisce a so portu I2C o SPI è u portu di SPI hè solu dispunibule nantu à u MPU-6000).
Alternative è equivalenti
- MPU-3300
- Mpu-6000
- Mpu-6500
Fabricatore di mpu-6050
U fabricatore di mpu-6050 hè tdk.Dopu à i dui fundatori di tdk, Dr Leogoro Kato è Vaki Taidi, Indiond Farite à Tokyo, anu fundatu Tokyo Denkiku kogyo K.K.in u 1935. Cum'è una marca di l'industria elettronica glubale, TDK hà sempre mantinutu una pusizione dominante in i campi di materie prime elettroniche è cumpunenti elettronici.Purtipio di Produttori di Tdk coponimenti passiviMagnetiche è Mems sensorii), l'EQU. In più, TDK ancu furnisce putenza furnituri è i dispusiti di energia, capi di energia, latini è altri prudutti.I so marche di u pruduttu includenu tdk, Emps, Invenensense, micronas, tronichi è tdk-lambda.
Diagramma di Bloccu Internu di Mpu-6050
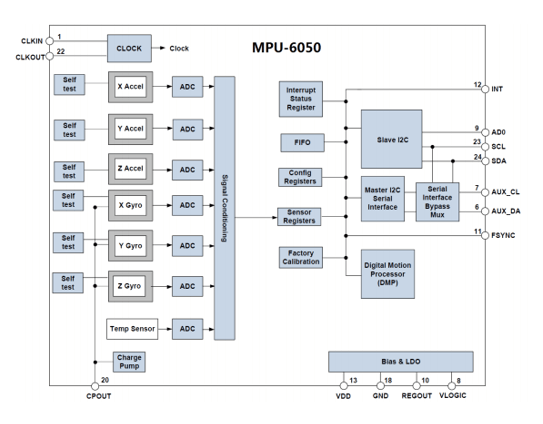
Frà, SCL è SDA sò interna iiche cunnessi à u MCU, cuntrattu u MCU l'mpu-6050 à sta l'interfaccia iIC.Ci hè ancu una interfata iic, dì micca chjamamente aux_cl è aux_da.Questa interfaccia pò esse aduprata per cunnette i dispusitivi di schiavi esterni, cum'è sensori magnetichi, per furmà un sensore di nove assi.Vlogic hè a tensione di io portu.Stu PIN pò sustene un minimu di 1.8V.Di solitu ci cunnette direttamente à VDD.Ad0 hè u PIN di cuntrollu di l'indirizzu di l'interfaccia IIC di l'IIC (cunnessu cù u MCU).Stu pin cuntrola u bit più bassu di l'indirizzu IIC.Sì hè cunnessu à GND, l'indirizzu IIC di MPU-6050 hè 0x68;S'ellu hè cunnessu à VDD, hè 0x69.Per piacè nutate chì l'indirizzu quì ùn includenu u bit più bellu di a trasmissione di dati (u bit più bassu hè adupratu per rapprisintà operazioni di lettura è di scrive).Nantu à u MWBALANDSTC15, AD0 hè cunnessu à GND, cusì l'indirizzu IIC di u Mpu-6050 hè 0x68 (escludendu u bit più bassu).
Inizializà l'interfaccia iIC
Mpu-6050 usi iic ticle di cumunicà cù STC15, cusì avemu bisognu di inizializà e linee di dati SDA è SCL cunnessu cù Mpu-6050 primu.
Resettate MPU-6050
Stu passu restaura tutti i registri dentru u mpu-6050 à i valori predeterminati, chì hè ottenutu da scrittura 1 à Bit7 di a gestione Registru 1 (0x6b).Dopu à resettore, u Registru di Gestione di u Power serà restituitu à u valore predeterminatu (0X40), è stu registru deve dopu esse stabilitu à 0x00 per svegliate u statu di travagliu normale.
Sceglite u intervallu di scala à a scala à a velocità angulare (gyro) è sensor di accelerazione
In questu passu, avemu stabilitu l'intervallu di scala à a scala à i dui sensori à traversu u registru di cunfigurazione Gyroscope (0x1b) è u registru di cunfigurazione di l'acelerazione sensori (0x1c) rispettivamente.Tipicamenti, avemu stabilitu l'intervallu di scala à a scala à u Gyroscope à ± 200Dps è l'intervallu di scala completa di l'accelerometru à ± 2 g.
Sceglite altri paràmetri
Quì, avemu bisognu di cunfurmà i seguenti parameteri: Disattivi interrotti, disattivà l'interfaccia I2C I2C, dispute a FIFO, stabilite a filtru di schernu di ignu (DLPF).Siccomu ùn avemu micca aduprà interrompe per leghje dati in questu capitulu, a funzione di interruzzione deve esse disattivata.À u listessu tempu, postu chì ùn usemu micca l'interfaccia aun i2c à cunnette altri sensori esterni, avemu da vicinu chjude sta interfaccia.Queste funzioni ponu esse cuntrullati per mezu di l'interruzzione di l'interruzzione di l'interruzzione (0x38) è registru di cuntrollu d'utilizatore (0x6a).Mpu-6050 pò aduprà scarabeci dati di sensori, ma ùn l'avemu micca usatu in stu capitulu, cusì tutti i quanciali cinturi deve esse chjusu.Questu pò esse cuntrullatu per mezu di u registru di a Fiva (0x23).Per prefetertu, u valore di questu Registru hè 0 (questu hè, fifu hè disattivatu), cusì ci ponu aduprà u valore prefetermo direttamente.A tarifa di campione di u Gyroscopiu hè cuntrullatu da u registru di divisu di u campione di u campione (0x19).Normalmente, stabilemu stu samplamentu ritmu à 50. a cunfigurazione di u filtru di bassinu digitale (DLPF) hè cumpletu attraversu u registru di cunfigurazione (0x1a).In generale parlante, faremu DLPF à a mità di a banda di banda per equilibrà a precisione di l'accuratezza di a dati è a risposta di risposta.
Configurà a fonte di u clock di u sistema è attivà u sensoru di velocità angulare è u sensore d'accelerazione
A favuritu di u sistema Fonte di clock dipende di u corru di gestione di u putere (0X6b), induve e trè pezzi più bIT di stu registruPer preghjudiziu, queste trè bit sò impetu à 0, chì significa u sistema usa u limitu 8MHz RC oscillatore cum'è a fonte di u clock.Tuttavia, per migliurà a precisione di l'orologio, spessu ci fussimu à 1 è selezziunate u X-Axis Gyroscopiu Pll cum'è a fonte di u clock.Inoltre, chì permette u sensoru angulariu di velocità è di accelerazione hè ancu un passu impurtante in u prucessu di inizializazione.E duie operazioni sò implementati per via di a gestione di u putere (0X6C).Simpliciamente stabilisce u pocu currispondente à 0 per attivà u sensore currispondente.Dopu à cumpletà i passi superi, u M UX-6050 ponu inserite u statu di u travagliu normale.Quelli registri chì ùn sò micca apposta appughjate u preset di i valori predeterminati da u sistema.
Cumu u travagliu Mpu-6050?
Sensor gyro
U sensorore hè uguratu cun un gyro dentru, chì sarà sempre parallelu à a direzione iniziale a causa di l'effettu gyoscopicu.Dunque, ci ponu calculà a di vista è l'angulu di rotazione da rifiutendu a deviazione di u gyro da a direzione iniziale da a divisione iniziale.
Sensore accelerometru
Un sensore di acceleratore hè un dispusitivu chì pò misurà accelerazione è chì travaglia secondu u principiu di l'effettu piezoelettric.Durante l'accelerazione, u sensore misura a forza inerziale appiicata à u bloccu di a massa è dopu calcula u valore di l'accelerazione utilizendu a seconda legge di Newton.
Processor di Motion digitale (dmp)
U DMP hè un modulu di trasfurmazione di dati in u cartulare di filtrazione di Kalman integratu per acquistà dati da u sensori di Gyroscopu è Accelerometru.Questa funzione reduce assai a carica di travagliu di u microprocessore perifericu è evita u prucessu di filtrazione di dati è di u fusione di dati.
NOTI:
Quaterions: Quaternions sò i numeri di supercomplex simplici.I numeri cumplessi sò cumposti di numeri veri più l'unità imaginaria I, induve i ^ 2 = -1.
Induve hè u mpu-6050?
- Ghjoculi
- Handset è Gaming Portabili
- Controlli di ghjocu basatu nantu à u muvimentu
- Tecnulugia Blufree ™ (per a stabilizazione video / sempri maghjina)
- Tecnulugia Airsign ™ (per a sicurità / autentificazione)
- Ricunniscenza instantgiterie ™ iG ™
- Sensori purtati per a salute, fitness è sport
- U ghjocu di u ghjocu è u quadru di l'applicazione
- Tecnulugia di MUCTIONCMAND (per i tacchi di gestimentu)
- Servizi Basati nantu servizii, Punti d'interessu, è mortu di cummingione
- I controlli remoti 3D per DTVs cunnessi in Internet è stabilisce scatuli superiore, 3D topi
- Touchanywhere ™ Tecnulugna di tecnulugia (per u cuntrollu di "No Touch" UI | Navigazione)
Pacchettu di Mpu-6050

Cumu riduce u noise di Mpu-6050?
Pudemu i seguenti modi per riduce u noise di mpu-6050.
Aduprate i sensori calibrati
Calivà l'accelerometru è Gyroscopiu di u Mpu-6050 pò eliminà i bias è l'errore di i sensori stessi, dunque riduce l'effettu di u noise.U prucessu di calibrazione hè generalmente hè custituitu da dui tappe: calibrazione statica è molle.
Prucessu di filtru hardware
Aghjunghjendu Capacoratori di Filter à a Linea di Power-Mpu-6050 pò riduce l'impattu di u sonu di l'alimentazione di u putere nantu à u sensore.Intantu, durante u layout PCB, duvemu pruvà à mantene u mpu-6050 alluntanati da fonti potenziale di interferenza, cum'è e linee di segni à alta qualità è di cunti d'altezzazioni.
Prucessu di filtrazione di u software
Dopu avè recullatu e dati crudi da u Mpu-6050, pudemu aghjunghje un filtru di filtru di software per pre-processà i dati iniziali per eliminà l'interferenza indetta di rumore.I metudi di filtring di u software usati include u filtru medianu, filtring medianu, filtrazione di Kalman è cusì.
Aduprate u filtru di bassa distanza
Mpu-6050 hà un filtru di bassa digitale integrata bassa digitale, chì pò esse usata per riduce u rumu di alta freccia sendugendu a so frequenza di cutoff.Specificamente, pudemu stabilisce a frequenza cutoff di u filatu digitale chì mudificà u filatu digitale
Mpu-6050 basatu u calculu di u calculu
U MPU-6050 hè un sensore di sei-Axis accelerometru è u sensore gyoscopiu chì pò esse usatu per misurà a mozione è l'attitudine di l'oggetti.U càlculu di u trajectoriu di muvimentu basatu nantu à MPU-6050 pò esse realizatu da i seguenti passi:
U primu passu hè di leghje i dati di u sensoru.Avemu bisognu di leghje i dati di l'accelerometru è Gyroscoper da i Sensori Mpu-6050 aduprendu e funzioni adattati è funzioni di a biblioteca.Queste dati sò generalmente pruduttori in un furmatu digitale, cusì qualchì travagliu di cunversione è di calibrazione hè necessariu per cunvertisce à e misure attuali in unità fisiche.
U sicondu passu hè di calculà l'accelerazione.Prima, avemu bisognu di processà i dati da l'accelerometru per deriva l'accelerazione di l'ughjettu in ogni l'assi.Inoltre, per calculà a velocità è u spustamentu di l'ughjettu in ogni l'assi, avemu bisognu di integrà i dati di l'accelerazione.A tecniche di inriturità numerichi, cum'è u metudu di Euler o u metudu di u Kutt di Luttanu, sò spessu aduprati in questu prucessu per assicurà a precisione di i calculi di spustamentu.
U terzu passu hè di calculà a velocità angulare.Aduprendu dati Gyroscope, a velocità angulare di l'ughjettu in ogni Axis pò esse calculatu.In novu, sta dati deve esse calibrata è cunvertita per ottene a velocità angulare in unità fisiche attuali.
U quartu passu hè di calculà a rotazione.Integrà i dati di a velocità angulare, l'angolo di rotazione di l'ughjettu in ogni Axis pò esse calculatu.Questu pò esse fattu aduprendu e tecniche di integrazione numeriche cum'è u metudu di euler o u metudu di longa-kutta per calculà l'angolo.
U quintu passu hè di fusionà i dati.Cumbinemu i dati da l'accelerometri è Gyroscopi per ottene l'attitudine completa è l'infurmazioni di a pusizione di l'ughjettu.Questu pò esse fattu aduprendu Algoritmi cum'è a Solver di l'attitudina basata in Quaternion o l'Euler Angle Solu.
U sestu passu hè di visualizà i risultati.Cunvertemu a trajettoria di u muvimentu di l'ughjettu di l'ughjettu in un inseme di punti in un sistema di coordenata 3d è a visualizazione di l'utilizazione di a visualizazione adatta per una capiscitura più intuitiva di l'ughjettu.
Dumande spessu [FAQ]
1. Cumu hè precisu hè mpu6050?
L'acquistenti acquistati mostranu una precisione suficiente di u 1% è l'affidabilità, assicurendu a dimensione curretta di l'elevatore di l'elevatore è di l'industria alta di l'elevatore.
2. Cumu leghje dati da MPu6050?
Per leghje l'registri anvuli16050 Internu, u maestru invia un cundizione iniziata, seguita da l'indirizzu I2c Slavu è un indirizzu di scrittura chì serà lettu.
3. Induva hè u mpu605050?
In traccia di seguitu cù e fitness.In Drones è quadcopters, mpu605050 hè adupratu per u cuntrollu di a pusizione.Usatu in u cuntrollà u bracciu roboticu.Dispositivi di cuntrollu di gesti di gesti.
4. Hè mpu6050 un IMU?
U bloccu di u Sensor Sensor Sensor Mpu5 leghje Dati da u Sensore Mpu-6050 chì hè cunnessu à u hardware.L'accelerazione di bloccu accelerazione, tarifa angulare, è a temperatura longu l'assi di u sensoru.
5. Chì hè a trasfurmazione di mpu6050?
Questu hè u processore di a bordu di u MPu6050 chì combina i dati chì venenu da l'accelerometru è Gyroscopu.U DMP hè a chjave per aduprà u mpu6050 è hè spiegatu in dettaglio dopu.Cum'è cù tutti i microprocessori di u DMP hà bisognu di firmware in ordine per esecutà.
prova di funzione.I prudutti più altu di u costu è u megliu serviziu hè u nostru impegnu eternu.
Articulu hot
- Sò cr2032 è cr2016 intercambiabili
- Mosfetu: Definizione, Principu di travagliu è Selezzione
- Installazione di relay è teste, l'interpretazione di i viti
- Cr2016 vs cr2032 Chì hè a differenza
- NPN vs pnp: Chì hè a differenza?
- Esp32 vs Stm32: Quale microcontroller hè megliu per voi?
- Guida di ingrenti di amplificatori di amplifiziu LM358: Pinout, un diagrams circuitu, edivalenti, esempi utili, esempi utili
- CR2032 vs DL2032 vs CP20URI FUNTARAZIONE
- A capisce e differenze Espe2 è Espe2-S3 Analisi ambientazione
- Analisi detallata di circuitu rc serie
 Esplorazione di e capacità è e applicazioni di u nip di cumunicazione nrRF24L01
Esplorazione di e capacità è e applicazioni di u nip di cumunicazione nrRF24L01
2024-04-25
 MMBT3904 Transistatore NPN: e so specificazioni, Guida di applicazione cumpritativa, è MMBT3904 VS. MMBT5551
MMBT3904 Transistatore NPN: e so specificazioni, Guida di applicazione cumpritativa, è MMBT3904 VS. MMBT5551
2024-04-25
Numeru di parte calda
 08053D475KAT2A
08053D475KAT2A CL21X106KPYNNNE
CL21X106KPYNNNE 100B330JT500XT
100B330JT500XT- CL21B334KAFNNNF
 EVK105CH4R7JW-F
EVK105CH4R7JW-F 0402YA390GAT2A
0402YA390GAT2A GRM316C81C225KA12D
GRM316C81C225KA12D 1808HA330MAT1A
1808HA330MAT1A 1812AA122JATME
1812AA122JATME 22257C104KAT2A
22257C104KAT2A
- B32924C3335M
- T496C156M016ATE2K0
- BAV99W-7-F
- CS82C54-10Z
- MAX1183ECM+D
- PE-53933S
- EP2AGX190EF29C5N
- PIC18F65J10-I/PT
- MMA7260Q
- V300A12C500BS2
- MCC200-08IO8
- MG100Q2YS1
- VI-B6L-IU/S
- T491C226M006AT4850
- DS90C383MTD
- TSB43AB21APDTG4
- TM4C1231H6PZI7R
- AD7859LAS
- ADAV4422BSTZ
- DS90CR218AMTDX
- HM514190AJ-7
- IDT89HPES12N3A1ZCBCG
- LT1871EMS-7#TRPBF
- M30622MCA
- MAX24001
- MAX456CQH
- PC87570-ICC/VPC
- PMB7880V-1.3G-G
- PS161HDM
- R5F2L38AANFA
- TH50VPF5585ADSB
- VT388FCX-ADJ
- LXT821TC
- MT48LC16M16A2B4-6AIT
- MTFC16GJGEF-AIT:Z
- SIS9255A3DA
- TSUMU58PWHL-LF-1
- IDTQS3861QG
- INA238AIDGSR